3. Historia de los sistemas operativos
|
Tiempo de lectura: 23 minutos |
La historia de los sistemas operativos se puede dividir en cinco grandes etapas o generaciones, obviamente conectadas con las generaciones de los ordenadores donde funcionaban.
3.1. 1ª Generación (1945-55)
En la primera generación de ordenadores no se utilizaban sistemas operativos.
Sus principales características son:
-
Computadoras construidas con electrónica de válvulas de vacío.
-
Sin sistema operativo.
-
Sin lenguajes de programación. Se programaban directamente en lenguaje máquina.
Algunos ejemplos de ordenadores destacables fueron:
- ENIAC (1945)
-
Se le considera el primer ordenador electrónico digital de propósito general, aunque existe cierta polémica sobre este punto. Lo cierto es que se construyeron otros ordenadores antes que este, pero o no eran de propósito general —como las famosas computadoras Colossus (1944), que fueron diseñadas para ayudar en criptoanálisis— o no eran electrónicos sino electromecánicos —como la computadora Z3 (1941), que usaba relés—.
No era un producto comercial sino un proyecto experimental de defensa que principalmente se diseñó y utilizó para calcular tablas de tiro de artillería destinadas al Laboratorio de Investigación Balística del Ejército de los Estados Unidos.
Z4 (1945) fue el primer ordenador digital comercial, pero era electro-mecánico.
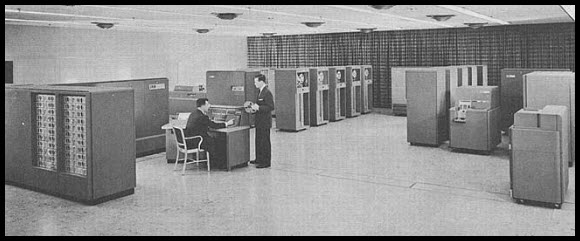
- IBM 701 (1953)
-
Fue el primer mainframe de la serie IBM 700, que a la larga se convertiría en un éxito de ventas. Utilizaba tubos de vacío y tarjetas perforadas.
|
El IBM 7090 —versión transistorizada del 709, que utilizaba válvulas de vacío, como todos los de la serie 700— y el posterior 7094, fueron usados por la NASA para los cálculos de control de las misiones de los programas espaciales Mercury y Gemini y durante la primera etapa del programa Apolo. |
3.2. 2ª Generación (1955-64)
En la segunda generación de ordenadores los transistores reemplazaron a las válvulas de vacío.
En lo que respecta a los sistemas operativos:
-
Aparecen los monitores del sistema, que se pueden considerar un predecesor de los sistemas operativos.
-
Sistema de procesamiento por lotes.
-
Se comienzan a utilizar lenguajes de programación, como: ensamblador, FORTRAN y COBOL.
GM-NAA I/O (General Motors and North American Aviation Input/Output system) fue el primer sistema operativo. Fue desarrollado por General Motors Research Laboratory en 1956 para el mainframe IBM 704 con el fin de automatizar la carga y ejecución de un nuevo trabajo una vez había terminado el anterior. Para su desarrollo se basaron en un monitor del sistema creado en 1955 por programadores de General Motors para el IBM 701.
{kind=link}
3.3. 3ª Generación (1965-1968)
En la tercera generación se comenzaron a utilizar los circuitos integrados, que fue una invención de finales de la década de 1950.
En lo que respecta a los sistemas operativos:
-
Aparecen los sistemas operativos multiprogramados.
-
Aparecen más lenguajes de programación.
El ejemplo más destacado de esta época es el IBM OS/360 Fue un sistema operativo desarrollado por IBM para su mainframe IBM System/360 (S/360) (véase la Figura 3.2). Su versión DOS/360 (Disk Operating System/360) fue el primer sistema operativo en hacer los discos magnéticos un requisito para poder operar.

Se anunció en 1964, pero fue lanzado en 1966, con un año de retraso respecto a la fecha prevista originalmente. Los motivos fundamentales fueron ciertos problemas de organización interna de la compañía y la falta de experiencia en proyectos de esa envergadura. Las previsiones iniciales eran de 1 millón de líneas de código y miles de componentes de software.
|
Algunos autores fechan los inicios de la ingeniería del software en la publicación del libro «The Mythical Man-Month: Essays on Software Engineering», escrito por Frederick Brooks y publicado en 1975. Frederick Brooks se basó en la experiencia adquirida mientras administraba el desarrollo del IBM OS/360, donde era jefe de proyecto. |
3.4. 4ª Generación (1965-1980)
La cuarta generación abarca desde mediados de los años 60 hasta finales de la década de los 70. Respecto a los ordenadores, es el resultado del desarrollo de los microprocesadores.
En lo que respecta a los sistemas operativos:
-
Aparecen los sistemas operativos de tiempo compartido.
-
Aparecen los terminales, los programas interactivos y las máquinas virtuales.
A continuación veremos los ejemplos más representativos de esta época.
3.4.1. MULTICS
MULTICS fue anunciado en 1964, fruto de la colaboración entre el MIT, General Electrics y Bell Labs, como el primer sistema operativo de propósito general.

Fue el primer sistema operativo en proporcionar un sistema de archivos jerárquico, intérprete de comandos implementado como programa de usuario, listas de control de acceso individuales para cada archivo y enlazado dinámico, entre otras características novedosas.
Además experimentó con eliminar la separación entre el espacio de direcciones de los procesos y los archivos. Es decir, como si los archivos estuvieran mapeados en memoria, permitiendo a los procesos acceder al contenido de los archivos directamente, sin tener que ordenar manualmente operaciones de lectura desde el disco a la memoria (véase el Apartado 17.3).
3.4.2. VM/CMS
VM/CMS es un sistema de IBM utilizado en los mainframes IBM System/360, System/370, System/390 y zSeries. VM es un hipervisor que se encarga de virtualizar el hardware para crear múltiples máquinas virtuales, dando la sensación de que cada una es un mainframe independiente.
Como sistema operativo de las máquinas virtuales, una opción común es CMS, un sistema interactivo y monousuario muy ligero, diseñado para operar fundamentalmente en una máquina virtual de VM. Gracias a VM/CMS, cada usuario tiene la sensación de trabajar en un sistema completamente independiente y seguro.
El desarrollo de VM/CMS comenzó en 1965 y la primera versión estuvo disponible a primeros de 1966. Las versiones actuales se denominan IBM z/VM.
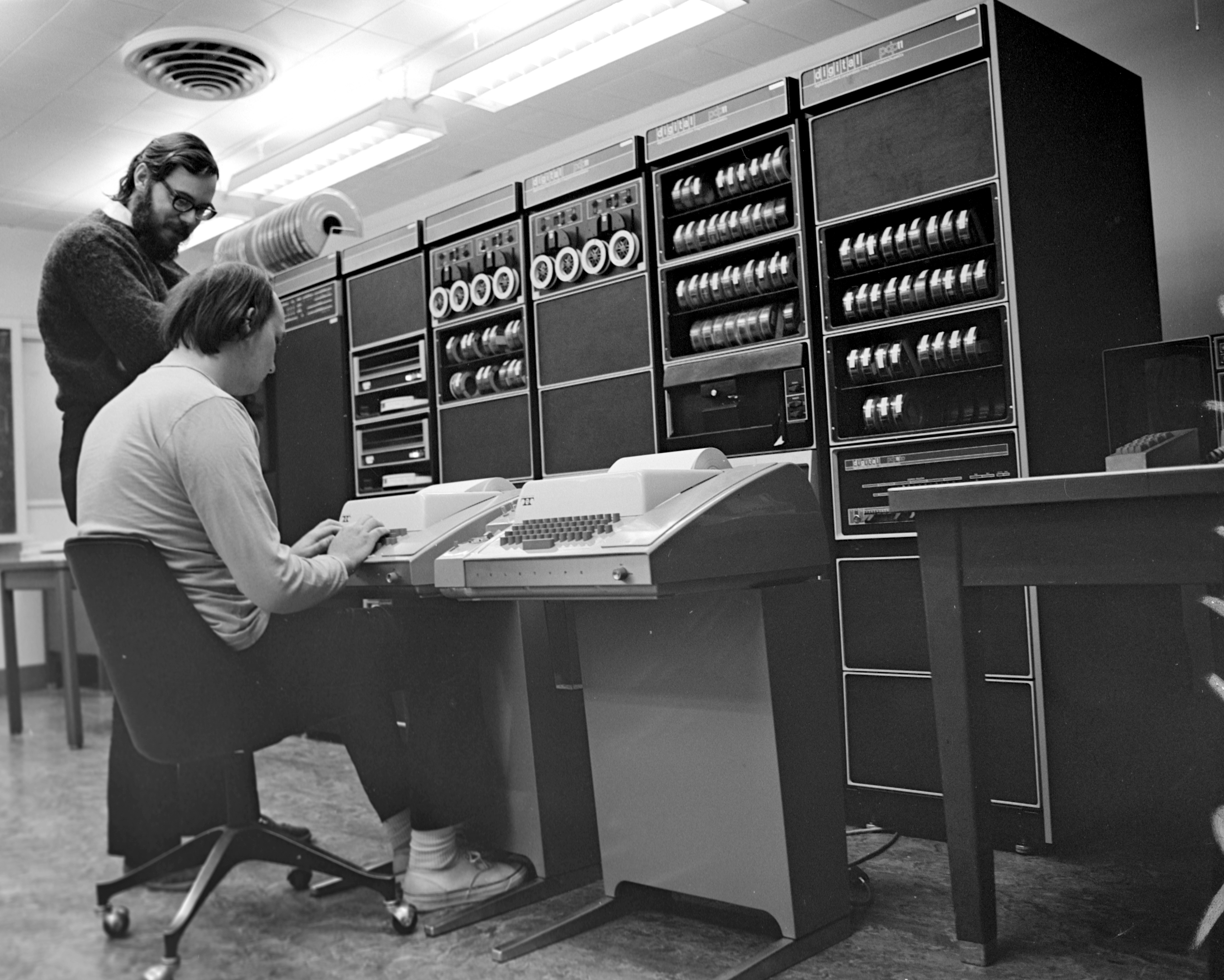
3.4.3. UNIX
UNIX fue desarrollado originalmente por Bell Labs en 1970 para los sistemas PDP-11/20 (véase la Figura 3.4). La autoría de este se le atribuye a un grupo de programadores, liderados por Ken Thompson, que decidieron rehacer el trabajo de MULTICS, pero a menor escala, después de que Bell Labs abandonara el proyecto MULTICS en 1969. Inicialmente se llamó UNICS y fue desarrollado para los sistemas PDP-7 —una minicomputadora de la serie PDP de Digital Equipment Corporation (DEC)—.
Los sistemas UNIX se caracterizan por ofrecer un gran número de pequeñas herramientas especializadas diseñadas para trabajar unidas —a través de la línea de comandos usando tuberías— y por usar la E/S salida de archivos como modelo universal de E/S. Es decir, que los dispositivos, ciertos mecanismos de comunicación entre procesos y hasta algunos aspectos de la configuración e información del sistema son gestionados como archivos.
La primera versión de UNIX fue implementada en ensamblador, como era común en la época. Posteriormente, Dennis Ritchie y Brian Kernighan diseñaron un nuevo lenguaje de programación llamado «C», especialmente pensado para que UNIX fuera escrito con él. Eso facilitó que UNIX pudiera ser portado a ordenadores diferentes. Además, gracias al lenguaje C, el código era más conciso y compacto, lo que se tradujo en que se pudieron desarrollar nuevas funcionalidades más rápidamente.
AT&T, la compañía matriz de Bell Labs, no podía competir en la industria de los ordenadores, por lo que puso el código fuente de UNIX a disposición de universidades, compañías privadas y del gobierno de los Estados Unidos. Eso aumentó su difusión y dio resultados inesperados. Por ejemplo, una de las variantes más importantes de UNIX fue BSD, desarrollada por la Universidad de California en Berkeley.
|
La versión 4.2BSD (Berkeley Software Distribution) de esta variante de UNIX fue la primera que incluyó la interfaz de sockets para facilitar la comunicación entre procesos a través de Internet y otras redes. Esta interfaz se ha convertido en estándar en prácticamente cualquier sistema operativo. También implementó y ayudó a difundir el estándar de comunicaciones TCP/IP, base de la actual Internet. Muchos sistemas operativos actuales, tanto libres como privativos, utilizan código de UNIX BSD en sus implementaciones de los protocolos TCP/IP y de diversas utilidades de red. |
Familias
Los sistemas UNIX siguieron evolucionando hasta adaptarse a la 5ª generación de sistemas, la de los sistemas de escritorio y los ordenadores personales. En la actualidad se considera que hay dos grandes familias de UNIX y las distintas variantes pertenecen a una u otra en función del UNIX del que derivaron originalmente:
-
La familia derivada de AT&T UNIX System V, en la que se incluyen sistemas operativos no libres, tales como: SCO OpenServer, Oracle/Sun Microsystems Solaris Operating Environment y SCO UnixWare.
-
La familia derivada de UNIX BSD, en la que se incluyen sistemas libres como: FreeBSD, NetBSD, OpenBSD, Darwin y DragonFly BSD, entre muchos otros.
|
FreeBSD es el sistema base de algunos sistemas no libres. Por ejemplo, Darwin es el sistema operativo en el que se basan los sistemas operativos de Apple: macOS, IOS, watchOS, tvOS e iPadOS. A su vez Darwin utiliza múltiples elementos de FreeBSD (véase el Apartado 3.5.8). Otro ejemplo destacable es Orbis OS —el sistema operativo de PlayStation 4— que también está basado en FreeBSD. |
Estandarización
En 1988 el IEEE publicó el primer estándar POSIX, un intento de crear un estandarizar mínimo de las características que debería soportar cualquier sistema operativo. Este estándar se basó en las características de las principales variantes de UNIX en el momento.
A principios de los 90, como las distintas variantes de UNIX estaban divergiendo —haciendo muy difícil desarrollar programas compatibles con todas ellas— se inició un esfuerzo para desarrollar una especificación común; de tal forma que solo aquellas variantes que la cumplieran pudieran denominarse como «UNIX». En 1994 se publicó la Single UNIX Specification (SUR), gestionada por The Open Group.
En 1998, las organizaciones IEEE, The Open Group y la International Organization for Standardization (ISO) comenzaron a trabajar en una nueva especificación que integrara POSIX y SUR. En 2002 se publicó como la «Single UNIX Specification, Version 3», cuya base es idéntica al estándar POSIX.1-2001 IEEE. Los sistemas operativos certificados por su cumplimiento reciben la marca «UNIX 03», como es el caso de macOS. Pero hay que tener en cuenta que la mayoría de los sistemas basados en UNIX BSD y Linux no han pasado nunca por el proceso de certificación, por lo que no pueden usar la marca UNIX, aunque cumplan con el estándar POSIX, que es la base de la especificación SUR.
Desde 2002 se han publicado otras versiones de SUR, siempre sobre la base de nuevas versiones de la especificación POSIX.
Sucesores
Sistemas UNIX y estilo UNIX hay muchos, pero Plan 9 —también de Bell Labs— fue desarrollado para llevar los conceptos de UNIX un poco más lejos, sustituyendo a UNIX en Bell Labs como plataforma principal de investigación en sistemas operativos.
Plan 9 es un sistema operativo distribuido, diseñado para que una red heterogénea de ordenadores separados geográficamente funcionara como un único sistema informático. En Plan 9, cada proceso tiene su propia vista del sistema de archivos, a través de la cual los procesos pueden acceder a distintos recursos o comunicarse con otros procesos. Es decir, Plan 9 generalizó el modelo universal de E/S de UNIX —basado en la E/S de archivos— porque todo a lo que puede tener acceso un proceso —incluidos los canales de comunicación con otras aplicaciones y servicios— son archivos en la vista privada que del sistema de archivos tiene cada proceso.
Los procesos en equipos diferentes pueden comunicarse de forma transparente. Solo hace falta que un proceso exponga parte de su sistema de archivos en la vista de los procesos que quieren comunicarse con él. Esto ocurre de forma transparente, gracias al protocolo de comunicación 9P de Plan 9. Este protocolo es el que usan actualmente Windows Subsystem for Linux (WSL), QEMU y otras herramientas de virtualización, para ofrecer acceso a los archivos de una máquina virtual desde el sistema operativo anfitrión.
|
El desarrollo de Plan 9 dejo otras aportaciones. Por ejemplo, el estándar de codificación Unicode UTF-8 nació para ser usado en Plan 9 como formato de cadenas nativo. |
En 1996, el desarrollo de Plan 9 pasó a un segundo plano para dar prioridad a Inferno, con el que Bell Labs intentó usar su experiencia con Plan 9 para desarrollar un sistema operativo distribuido que al mismo tiempo fuera una plataforma con la que competir con Java. Las aplicaciones se desarrollaban en un lenguaje llamado Limbo y se ejecutaban en una máquina virtual —similar a la de Java— que venía incluida con Inferno. De esta manera las aplicaciones podían ejecutarse independientemente de la arquitectura del hardware.
3.4.4. VMS
VMS es un sistema operativo de 32 bits diseñado originalmente por Digital Equipment Corporation (DEC) —ahora propiedad de HP— en 1978 para usarlo en minicomputadoras VAX. Posteriormente fue portado a sistemas DEC Alpha e Intel Itanium.

Las siglas VMS vienen de Virtual Memory System, ya que una de sus principales características era explotar el concepto de memoria virtual. Este concepto también es muy utilizado en los sistemas operativos modernos. Permite que los procesos se ejecuten aislados, unos de otros, en la memoria principal y sin tener que ser cargados completamente, lo que permite que cada uno consuma menos memoria.
VMS era un sistema multiusuario y multiprocesador que podía distribuir el trabajo entre varias máquinas, lo que le permitía ser tolerante a fallos.
|
VMS es en cierta medida un ancestro de Microsoft Windows NT (véase el Apartado 3.5.6). Para desarrollar Windows NT, Microsoft contrató a un grupo de desarrolladores de Digital Equipment Corporation. Muchos aspectos del diseño de Windows NT reflejan la experiencia de DEC en VMS. |
3.4.5. IBM OS/400
El IBM OS/400 es un sistema utilizado en la familia de minicomputadoras IBM AS/400 —llamada iSeries desde 2006—. Fueron introducidos en el mercado en 1988, pero aún es posible verlos en algunas organizaciones. En 2008 el sistema operativo IBM OS/400 pasó a llamarse IBM i y siguen publicándose nuevas versiones en la actualidad.
3.5. 5ª Generación (desde 1980):
Esta última generación abarca desde la década de 1980 hasta la actualidad.
Respecto a los sistemas operativos:
-
Incluye a los sistemas operativos de escritorio y ordenadores personales (PC).
-
Aparecen múltiples conceptos nuevos: monousuario, multitarea, distribuidos, paralelos, tiempo real, etc.
|
Se puede observar una muestra de la interfaz gráfica de usuario de algunos de estos sistemas en el artículo «Operating System Interface Design Between 1981-2009». |
3.5.1. CP/M
CP/M (1974) fue el sistema operativo estándar en la primera generación de microcomputadoras. Fue creado por Digital Research, Inc. —fundada por Gary Kildall— para ser el sistema operativo de los microordenadores basados en Intel 8080/85 y Zilog Z80.
Con la elección de MS-DOS por parte de IBM para su IBM PC, CP/M fue perdiendo mercado paulatinamente hasta desaparecer. Sin embargo, la influencia de CP/M en MS-DOS es indudable, en tanto en cuanto 86-DOS, el predecesor de MS-DOS, estaba basado en las ideas de CP/M.
3.5.2. MS-DOS
MS-DOS fue el sistema operativo estándar en la segunda generación de microcomputadoras. No era ni multitarea ni multiusuario. Fue el primer sistema operativo del IBM PC —lanzado en 1981— y durante mucho tiempo fue ampliamente utilizado en toda la plataforma «PC compatible».
MS-DOS fue creado por Seattle Computer Products (SCP) con el nombre de 86-DOS en 1979. Se basaron en ideas de CP/M, pues pretendían ofrecer una versión de CP/M para procesadores Intel 8086. Inicialmente era conocido como QDOS (Quick and Dirty Operating System) pero SCP le cambió el nombre en 1980, cuando comenzaron a licenciarlo. Posteriormente Microsoft adquirió el sistema y lo vendió a IBM en 1981 con el nombre de MS-DOS.
Tanto IBM como Microsoft lanzaron versiones de DOS, aunque originalmente IBM solamente validaba y empaquetaba el software de Microsoft. Microsoft lanzaba sus versiones bajo el nombre de MS-DOS, mientras IBM las lanzaba bajo el nombre de IBM PC-DOS.
|
En PCjs se pueden probar de forma sencilla sistemas operativos y aplicaciones antiguas del IBM PC. Solo hace falta acceder con el navegador y elegir la experiencia que más nos llame la atención. |
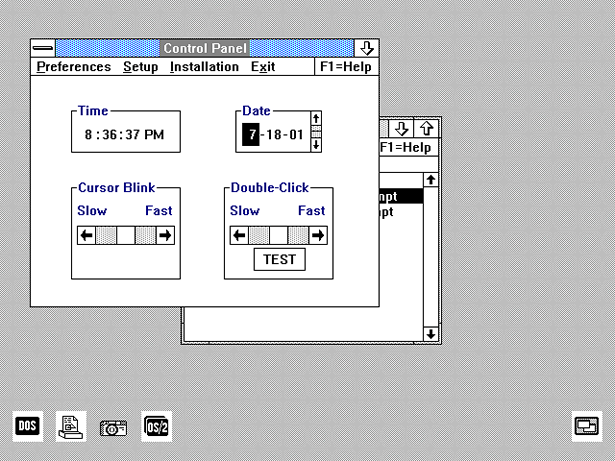
3.5.3. OS/2
OS/2 fue un sistema operativo creado por Microsoft e IBM para aprovechar las nuevas características de la segunda generación de ordenadores personales de IBM, equipados con procesador Intel 80286. Pero al final terminó siendo desarrollado en exclusiva por IBM.
OS/2 fue pensado como un sucesor con operación en modo dual de MS-DOS y de Microsoft Windows 2.0. Fue anunciado en abril y lanzado en diciembre de 1987 como un sistema operativo en modo texto. En la versión 1.1, lanzada en noviembre de 1988, se le añadió interfaz gráfica.
|
En los sistemas con operación en modo dual se distingue entre dos modos de ejecución, de tal forma que solo en el modo en el que se ejecuta el código del sistema operativo se pueden realizar operaciones peligrosas. En el otro modo y con menos privilegios, se ejecutan las aplicaciones de usuario. Para más información, véase el Apartado 7.2 |
La colaboración entre IBM y Microsoft terminó en 1990, entre el lanzamiento de Windows 3.0 y la de OS/2 1.3. El aumento de popularidad de Windows llevó a Microsoft a dejar de centrarse en el desarrollo de OS/2, lo que hizo que IBM se preocupara por los continuos retrasos en el desarrollo de OS/2 2.0. Inicialmente ambas compañías acordaron que IBM tomaría el mantenimiento de OS/2 1.0 y el desarrollo de OS/2 2.0, mientras Microsoft continuaría desarrollando OS/2 3.0, que entonces era conocido como «NT OS/2». Sin embargo, Microsoft finalmente decidió renombrar NT OS/2 como Windows NT, dejando el futuro desarrollo de OS/2 en manos de IBM.
OS/2 Warp 3 fue un sistema completo de 32 bits lanzado en 1994. Le seguiría OS/2 Warp 4, en 1996. Poco después, IBM anunció que OS/2 desaparecería.
3.5.4. Windows 3.x
La familia Windows 3.x de Microsoft Windows fue desarrollada desde 1990 hasta 1994. Windows 3.0 fue la primera versión de éxito de Windows, permitiendo a Microsoft competir con el Macintosh de Apple Computer y el Commodore Amiga.
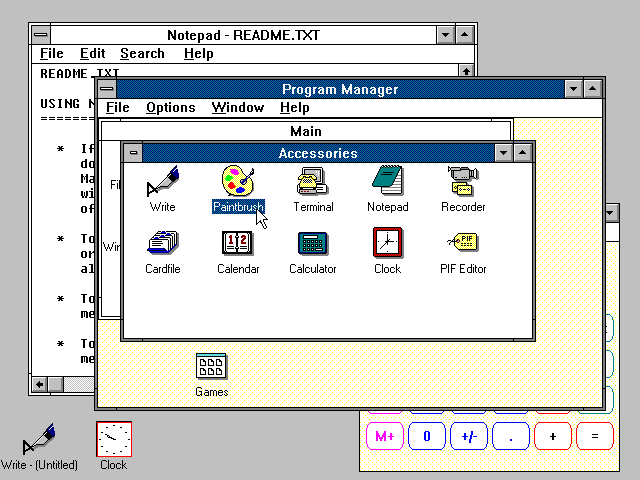
En 1983, Microsoft anunció el desarrollo de Windows, una interfaz gráfica de usuario para su sistema MS-DOS, que se usaba en los IBM PC y compatibles desde 1981. Windows requería una instalación previa de MS-DOS y era iniciado como un programa más, que podía ser terminado en cualquier momento, devolviendo al usuario a la línea de comandos de MS-DOS.
MS-DOS le proporcionaba a Windows controladores de dispositivo para ciertas tareas, como el acceso al CD-ROM o a la interfaz de red. Sin embargo Windows ejecutaba aplicaciones específicas de Windows, almacenadas en un formato ejecutable mucho más complejo que el de los programas de MS-DOS. Además, debido a que MS-DOS no aislaba a las aplicaciones del hardware y no se protegía así mismo de los errores en dichas aplicaciones, Windows disponía de controladores de dispositivo propios, así como sus propios sistemas de gestión de procesos y de memoria. En realidad Windows no se ejecutaba sobre MS-DOS, si no que hacía uso de él. Por ello puede ser considerado como un sistema operativo.
3.5.5. Windows 95, 98, Me
La familia Windows 3.x fue sustituida por una serie de sistemas operativos gráficos híbridos de 16/32 bits.
Windows 95 fue lanzado en 1995. Fue el primer Windows unido a una versión de MS-DOS específica, aunque este hecho se intentaba mantener oculto. Entre las características de Windows 95 destacan: mejoras significativas en la interfaz de usuario (véase la Figura 3.8), nombres de archivo de hasta 256 caracteres con conservación de mayúsculas y minúsculas —en MS-DOS el límite era de 8 caracteres para el nombre más 3 de extensión— y multitarea expropiativa para las aplicaciones de 32 bits.
|
Como veremos en el Apartado 14.1, la planificación expropiativa es una técnica que permite al sistema operativo expulsar de la CPU a los procesos en ciertas circunstancias; como, por ejemplo, que llevan demasiado tiempo utilizando la CPU de forma ininterrumpida. En la familia Windows 3.x la planificación era cooperativa, es decir, los procesos abandonaban la CPU voluntariamente. Esto ocasionaba problemas con programas que no devolvía la CPU al sistema con la suficiente frecuencia, ya que así el resto de procesos no tenía ocasión de ejecutarse para hacer su trabajo o responder al usuario. |
Windows 98 fue lanzado el 25 de junio de 1998. Le siguió Windows Me, el 14 de septiembre de 2000. Windows Me fue la última versión de la familia de sistemas operativos híbridos de 16/32 bits que sucedió a la familia Windows 3.x.
3.5.6. Windows NT, 2000, XP, Vista, 7, 8 y 10
Windows NT fue un sistema operativo de 32 bits. El primero de la familia de sistemas operativos Microsoft Windows actuales.
Su desarrollo empezó en 1988 con el nombre de OS/2 3.0. Cuando Windows 3.0 fue lanzado en mayo de 1990, tuvo tanto éxito que Microsoft decidió cambiar la API del aún en desarrollo NT OS/2 —que era como Microsoft lo llamaba entonces— pasando de ser una versión extendida de la API de OS/2 a una versión extendida de la API de Windows 3.0. Esta decisión causó tensión entre Microsoft e IBM y provocó que finalmente terminara la colaboración.
|
Una interfaz de programación de aplicaciones o API (del inglés Application Programming Interface) es el conjunto de funciones, procedimientos o métodos que ofrece el sistema operativo para ser utilizado por las aplicaciones. |
Como hemos comentado anteriormente, Microsoft contrató a un grupo de desarrolladores de Digital Equipment Corporation para crear Windows NT. Por lo que muchos de sus elementos reflejan la experiencia anterior de DEC en VMS.
Windows NT soportaba varias API de distintos sistemas operativos —por ejemplo Win32, POSIX y OS/2 2.1— que eran implementadas como subsistemas encima de una API nativo no documentado públicamente. Esta estructura en subsistemas, fue lo que permitió la adopción tardía de la API de Windows 3.0 como API principal, tal y como hemos comentado.
La primera versión —Windows NT 3.1— lanzada el 13 de julio de 1993, era un sistema operativo microkernel (véase el Apartado 3.5.8 un poco más adelante) multiplataforma que corría sobre procesadores x86, DEC Alpha, MIPS 4000 y PowerPC.
Windows NT 4.0 —lanzado en 1996— fue la última versión en soportar plataformas distintas a Intel IA-32. Aunque el desarrollo de Windows 2000 para procesador Alpha continuó un poco más, hasta 1999, cuando Compaq dejó de soportar Windows NT en esa arquitectura. Además Windows NT 4.0 integró en el núcleo más funciones —por ejemplo, parte del subsistema gráfico— para obtener un rendimiento más próximo al de Windows 95 en ese apartado.
Windows 2000 —o Windows NT 5.0— fue lanzado el 17 de febrero de 2000 y fue el primer sistema operativo de la familia NT al que se le eliminaron las siglas del nombre. Fue por motivos de marketing, para favorecer la unificación de las dos familias de sistemas operativos Microsoft Windows de entonces —Windows 9x y Windows NT— alrededor de la tecnología NT.
Windows XP —o Windows NT 5.1— completó en 2001 el proceso de unificación de las dos familias de sistemas operativos Windows. Con su aparición forzó la extinción de la familia Windows 9x, al sustituirla con una versión de Windows XP denominada Windows XP Home Edition, específica para la informática doméstica.
3.5.7. GNU/Linux
GNU/Linux es un sistema operativo libre y, tal vez, el más famoso proyecto de software libre.
El proyecto GNU se inició en 1983, con el fin de desarrollar un sistema operativo estilo UNIX enteramente libre. El proyecto incluía la creación de herramientas de desarrollo de software y aplicaciones de usuario.
Mucho tiempo después, el estudiante universitario finés Linus Torvalds comenzó a desarrollar el núcleo Linux como hobby, mientras estudiaba en la Universidad de Helsinki. Torvalds originalmente usaba Minix, un sistema operativo simplificado escrito por Andrew Tanenbaum para enseñar diseño de sistemas operativos. Sin embargo, el hecho de que Tanenbaum no diera soporte a las mejoras del sistema operativo que eran propuestas por otros desarrolladores, llevó a Torvalds a escribir un sustituto de MINIX.
En 1991, cuando se liberó la primera versión del núcleo Linux, el proyecto GNU había desarrollado todos los componentes necesarios del sistema operativo excepto el núcleo. Torvalds y otros desarrolladores rápidamente adaptaron Linux para que funcionara con los componentes de GNU, creando un sistema operativo completamente funcional que se denomina GNU/Linux.
El núcleo Linux fue licenciado bajo la GNU General Public License (GPL), como el resto del proyecto GNU. Pero Linux no es parte de dicho proyecto. El proyecto GNU tiene su propio núcleo, denominado GNU/Hurd, que lleva 30 años en desarrollo y parece que aún está muy lejos de estar listo.
|
GNU no es el único sistema operativo que utiliza el núcleo Linux. Android, por ejemplo, es un sistema operativo que usa el núcleo Linux, pero no es GNU. |
3.5.8. Mach
Mach es un núcleo de sistema operativo desarrollado en la Universidad Carnegie-Mellon (CMU). El proyecto en la CMU se desarrolló desde 1985 hasta 1994.
Mach explora el concepto que denominamos microkernel. En los sistemas operativos microkernel solo se implementa en el núcleo del sistema un conjunto mínimo de servicios básicos. El resto de los servicios proporcionados por el sistema operativo se implementan como procesos con menos privilegios.
Por sus ventajas en cuanto a seguridad y fiabilidad, en algún momento se pensó que los microkernel dominarían el universo de los sistemas operativos. Sin embargo, el mayor esfuerzo hasta la fecha para conseguirlo es GNU/Hurd, que lleva varias décadas de retraso. Por fortuna, otros sistemas operativos microkernel han tenido algo más éxito, como es el caso de QNX o MINIX 3. Mientras que Google parece que lo va a intentar con Google Fuchsia, el posible sustituto de Android.
A mediados de los 90, Apple Computers seleccionó OpenStep como base para el sucesor de su clásico Mac OS. OpenStep es realmente una versión actualizada de NeXTSTEP que era un sistema basado en un núcleo Mach 2.5 con porciones del sistema UNIX BSD de la Universidad de Berkeley. Por tanto, la mezcla de Mach con UNIX BSD de OpenStep es la base del sistema operativo macOS actual de Apple.

